

Product details
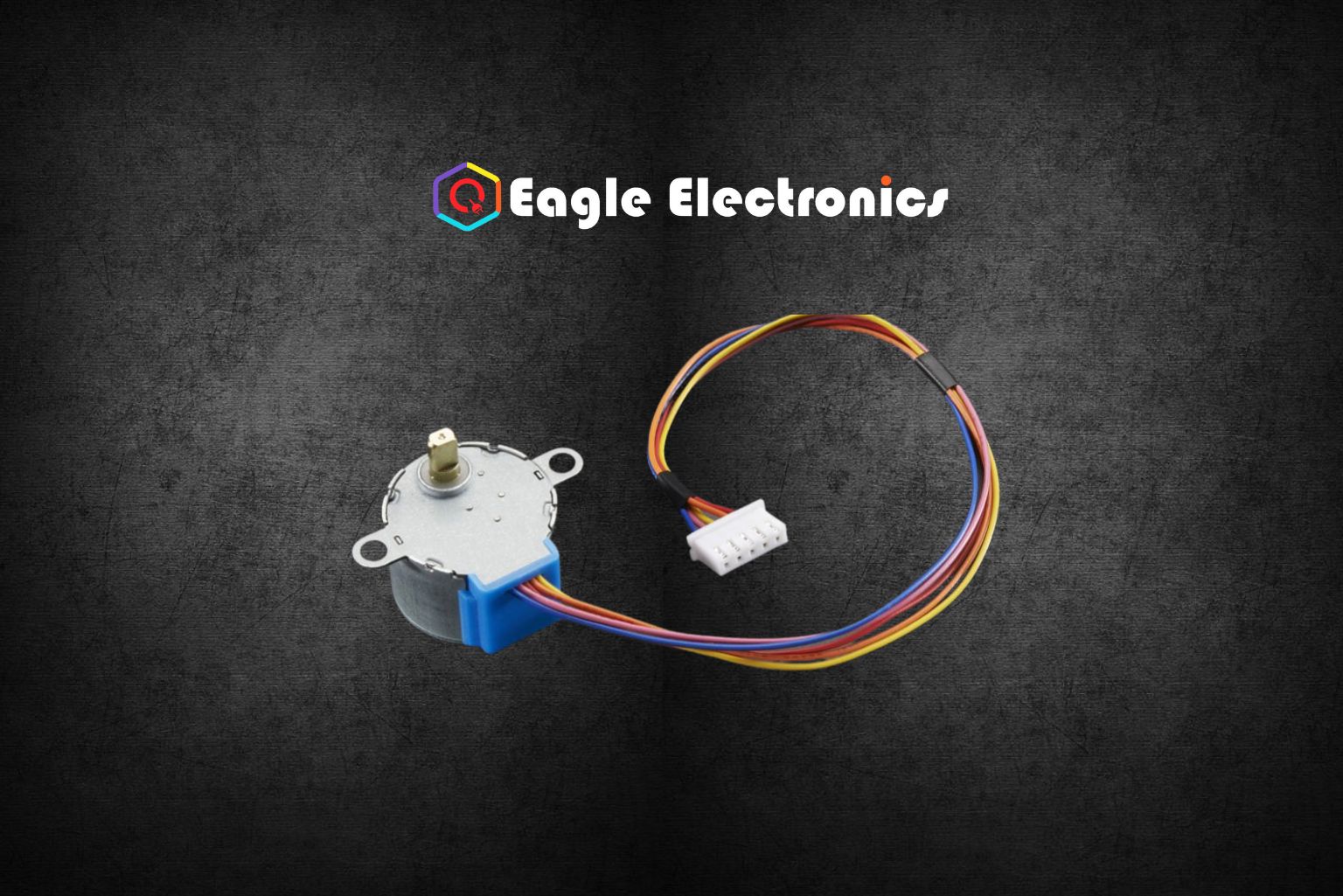
A stepper motor is an electromechanical device that converts electrical pulses into discrete mechanical movements. The shaft or spindle of a stepper motor rotates in discrete step increments when electrical command pulses are applied to it in the proper sequence. The motor’s rotation has several direct relationships to these applied input pulses. The sequence of the applied pulses is directly related to the direction of motor shaft rotation. The speed of the motor shaft rotation is directly related to the frequency of the input pulses and the length of rotation is directly related to the number of input pulses applied. One of the most significant advantages of a stepper motor is its ability to be accurately controlled in an open-loop system. Open loop control means no feedback information about the position is needed. This type of control eliminates the need for expensive sensing and feedback devices such as optical encoders. Your position is known simply by keeping track of the input step pulses.
Specifications
- Rated voltage 5VDC
- Number of Phase 4
- Speed Variation Ratio 1/64
- Stride Angle 5.625° /64
- Frequency: 100Hz
- DC resistance : 50Ω±7%(25℃)
- Idle In-traction Frequency : > 600Hz
- Idle Out-traction Frequency : > 1000Hz In-traction Torque >34.3mN.m(120Hz) Self-positioning
- Torque >34.3mN.m Friction torque : 600-1200 gf.cm
- Pull in torque: 300 gf. cm
- Insulated resistance >10MΩ(500V)
- Insulated electricity power :600VAC/1mA/1s
- Insulation grade :A
- Rise in Temperature <40K(120Hz)
- Noise <35dB(120Hz,No load,10cm)
- Unipolar stepper with 0.1″ spaced 5-pin cable connector
- 513 steps per revolution
- 1/16.032 geared down reduction
- Dimensions: 28mm diameter, 20mm tall not including 9mm shaft with 5mm diameter
- 9″ / 23 cm long cable
- Holding Torque: 150 gram-force*cm, 15 N*mm/ 2 oz-force*in
- Shaft: 5mm diameter flattened
- Approx 42 ohm DC impedance per winding
- Weight: 33 g.
- PCB Dimension (LXWXH):42.0X30.8X28.9mm




There are no reviews yet.